Raybot Smartworks
16:59
2026/01/22
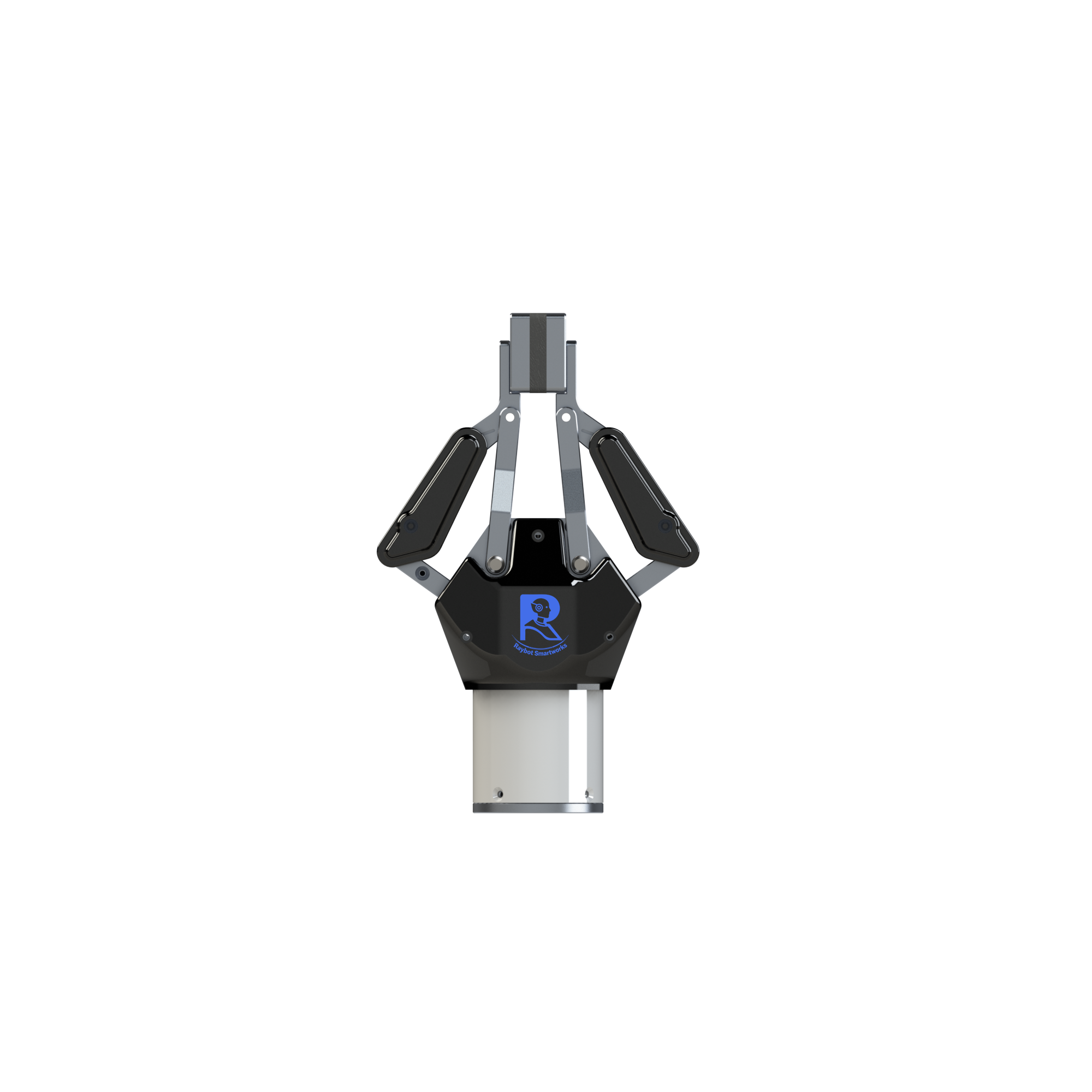
这款夹爪采用创新的双指自适应设计,双指内部集成了丝杆、行星减速机、连杆机构可实现超大夹持力。这种巧妙的结构赋予了它“灵巧”的特性,能够像人手一样自然贴合物体表面,自动适应不同形状的物体,让抓取变得简单而高效。在运行过程中,夹爪能智能维持设定的力度,确保每一次抓取都既稳固又安全,避免损伤物体。夹爪提供物体掉落检测功能,方便用户轻松应对夹持物品掉落场景。夹爪具备EtherCAT、CAN2.0两种高速通讯接口,最高实现4kHz通讯频率,能够轻松融入各类自动化系统,实现无缝连接与控制。
强大的夹持力,确保稳固抓取各种物体
105mm的总行程,适应不同尺寸的物体

GP2-53-120-E 夹爪采用创新的双指自适应设计,提供智能的控制方式,支持对夹持位置和夹持力度进行精准编程调节。
双指连杆弹簧结构,可自动贴合物体轮廓,抓取不同形状,无需复杂编程。
夹持位置与力度独立可设,运行中稳定维持预设值,实现稳固且柔性的抓取。
融合力位双控策略,智能判断夹持状态,支持CAN、EtherCAT等标准接口,即连即用。
仅1kg的重量,适合各种机械臂末端安装,不会增加过多负载。
支持CAN和EtherCAT通讯方式,最高实现4kHz通讯频率,轻松融入各类自动化系统。
GP2-53-120-E 夹爪的核心优势
双指连杆弹簧结构,可自动贴合物体轮廓,抓取不同形状,无需复杂编程。
夹持位置与力度独立可设,运行中稳定维持预设值,实现稳固且柔性的抓取。
融合力位双控策略,智能判断夹持状态,支持CAN、EtherCAT标准接口,即连即用。