Raybot Smartworks
16:59
2026/01/22
高性能7自由度协作机器人,专为精密操作与智能制造设计。配备先进的谐波电机和智能控制系统,提供卓越的精度、灵活性和可靠性。
灵活的7个关节设计,实现复杂的空间运动轨迹
末端额定负载能力达10kg,满足大多数工业应用需求
±0.05mm重复定位精度,确保操作的准确性和一致性
融合前沿工业技术与人性化设计,以硬核技术支撑智能制造,为各类精密作业场景提供高效、稳定、易集成的核心解决方案。
支持CAN/EtherCAT通讯协议,最高4kHz实时通讯速率,毫秒级响应,确保控制指令精准同步,保障作业实时性与稳定性。
提供完整开源机械臂视觉方案,兼容ROS2、Python、C++等多种主流开发环境,降低二次开发门槛,适配个性化应用需求。
内置多种运动规划器,支持在线动作编程,无需复杂操作,快速适配不同作业流程,大幅简化调试与操作成本。
7个关节均采用高精度谐波电机,支持独立变速控制,运动更加平滑自然。
IP54防护等级,防尘防水,适配宽工作温度范围,可在各类复杂工业环境下持续稳定运行,降低设备故障率。
集成EtherCAT/CAN/RS485等多种通讯接口,兼容性强,便于与各类产线设备、控制系统集成,灵活拓展应用场景。
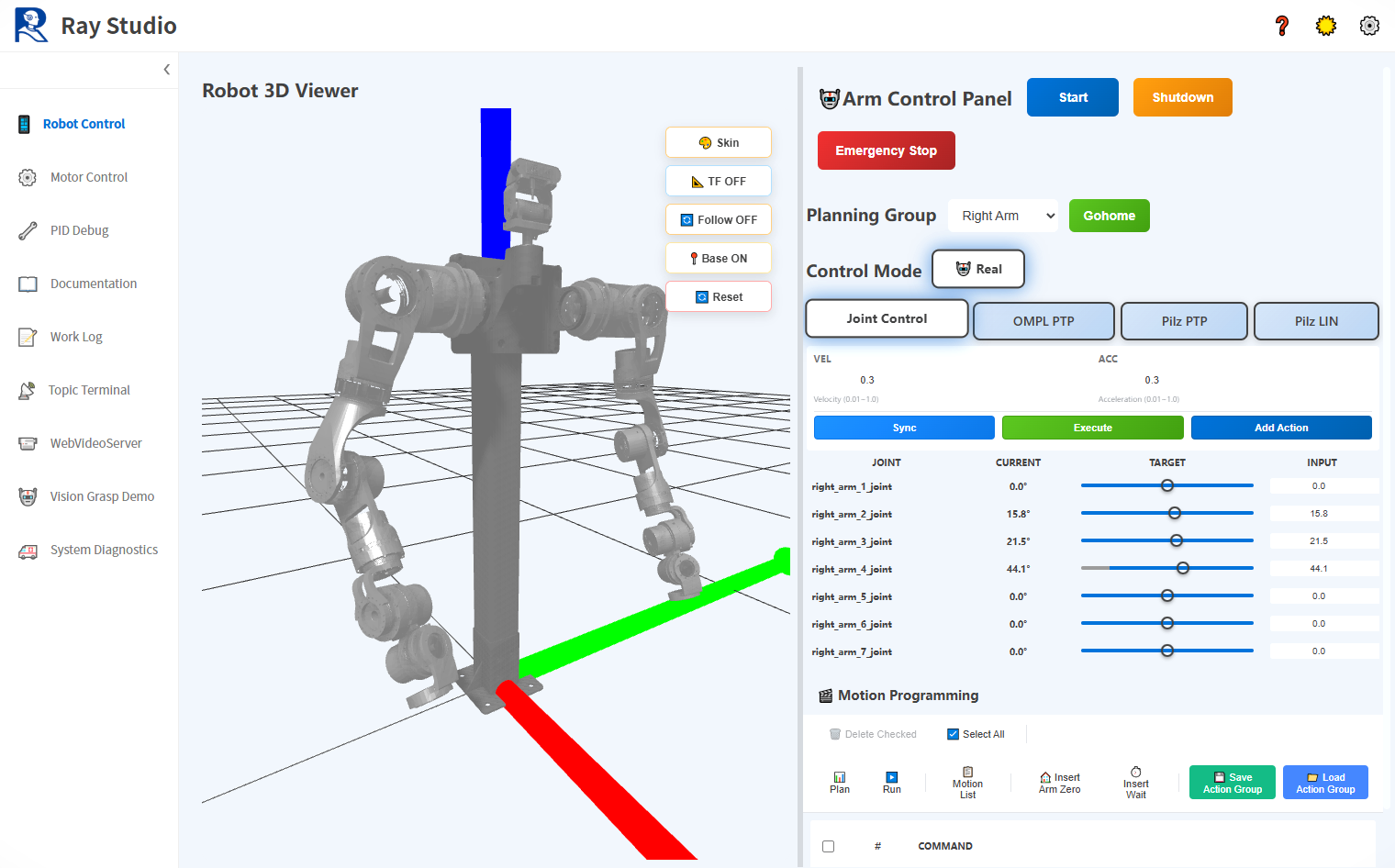
实时控制机械臂的 Web 应用程序