Raybot Smartworks
16:59
2026/01/22
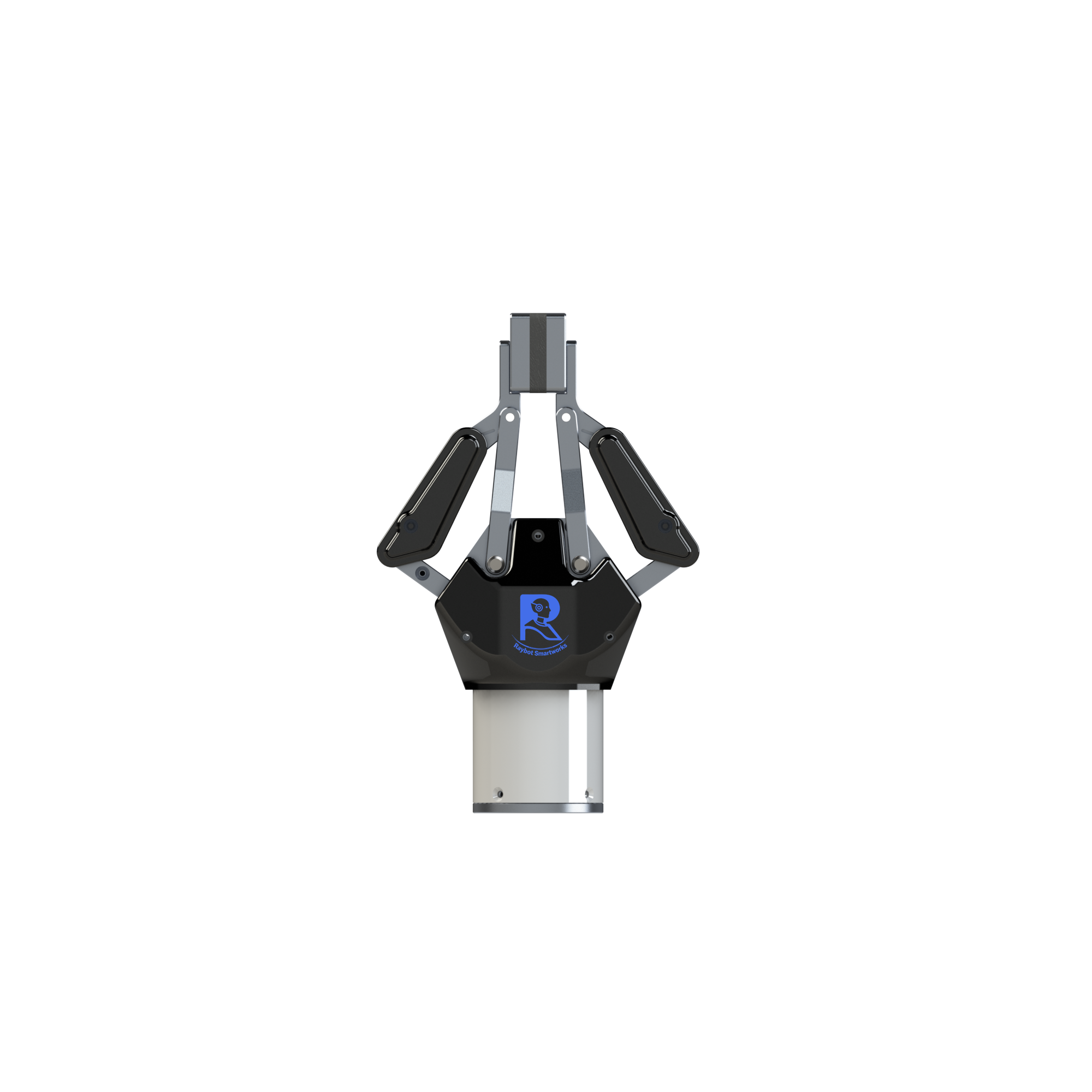
This gripper adopts an innovative dual-finger adaptive design, with integrated lead screw, planetary reducer, and link mechanism inside the dual fingers to achieve super large clamping force. This clever structure gives it "dexterous" characteristics, allowing it to naturally fit the surface of objects like a human hand, automatically adapt to objects of different shapes, making grabbing simple and efficient. During operation, the gripper can intelligently maintain the set force, ensuring each grab is both stable and safe, avoiding damage to objects. The gripper provides object drop detection function, making it easy for users to handle the scene where the clamped object drops. The gripper has two high-speed communication interfaces: EtherCAT and CAN2.0, with a maximum communication frequency of 4kHz, which can be easily integrated into various automation systems for seamless connection and control.
Strong clamping force ensures stable grabbing of various objects
105mm total stroke, adapting to objects of different sizes

GP2-53-120-E gripper adopts an innovative dual-finger adaptive design, providing intelligent control methods that support precise programming adjustments for clamping position and force.
Dual-finger link spring structure, can automatically fit object contours, grab different shapes without complex programming.
Clamping position and force can be set independently, stably maintaining preset values during operation, achieving stable and flexible grabbing.
Integrating force and position dual control strategy, intelligently judging clamping status, supporting CAN, EtherCAT and other standard interfaces, plug and play.
Only 1kg weight, suitable for various robotic arm end installations, not adding too much load.
Supports CAN and EtherCAT communication methods, with a maximum communication frequency of 4kHz, easily integrated into various automation systems.
Core advantages of GP2-53-120-E gripper
Dual-finger link spring structure, can automatically fit object contours, grab different shapes without complex programming.
Clamping position and force can be set independently, stably maintaining preset values during operation, achieving stable and flexible grabbing.
Integrating force and position dual control strategy, intelligently judging clamping status, supporting CAN, EtherCAT, plug and play.